
Code
// C++ Arduino Code (Copy Below)
#include <Servo.h>
Servo dustbinServo;
// Define pins
const int trigPin = 5;
const int echoPin = 6;
const int servoPin = 9;
// Variables
long duration;
int distance;
void setup() {
dustbinServo.attach(servoPin);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
dustbinServo.write(0); // Lid closed
Serial.begin(9600);
}
void loop() {
// Send ultrasonic pulse
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read echo time
duration = pulseIn(echoPin, HIGH);
// Calculate distance (in cm)
distance = duration * 0.034 / 2;
Serial.print("Distance: ");
Serial.print(distance);
Serial.println(" cm");
// If object is near (less than 15 cm)
if (distance > 0 && distance < 15) {
dustbinServo.write(90); // Open lid
delay(3000); // Keep open for 3 seconds
dustbinServo.write(0); // Close lid
}
delay(300);
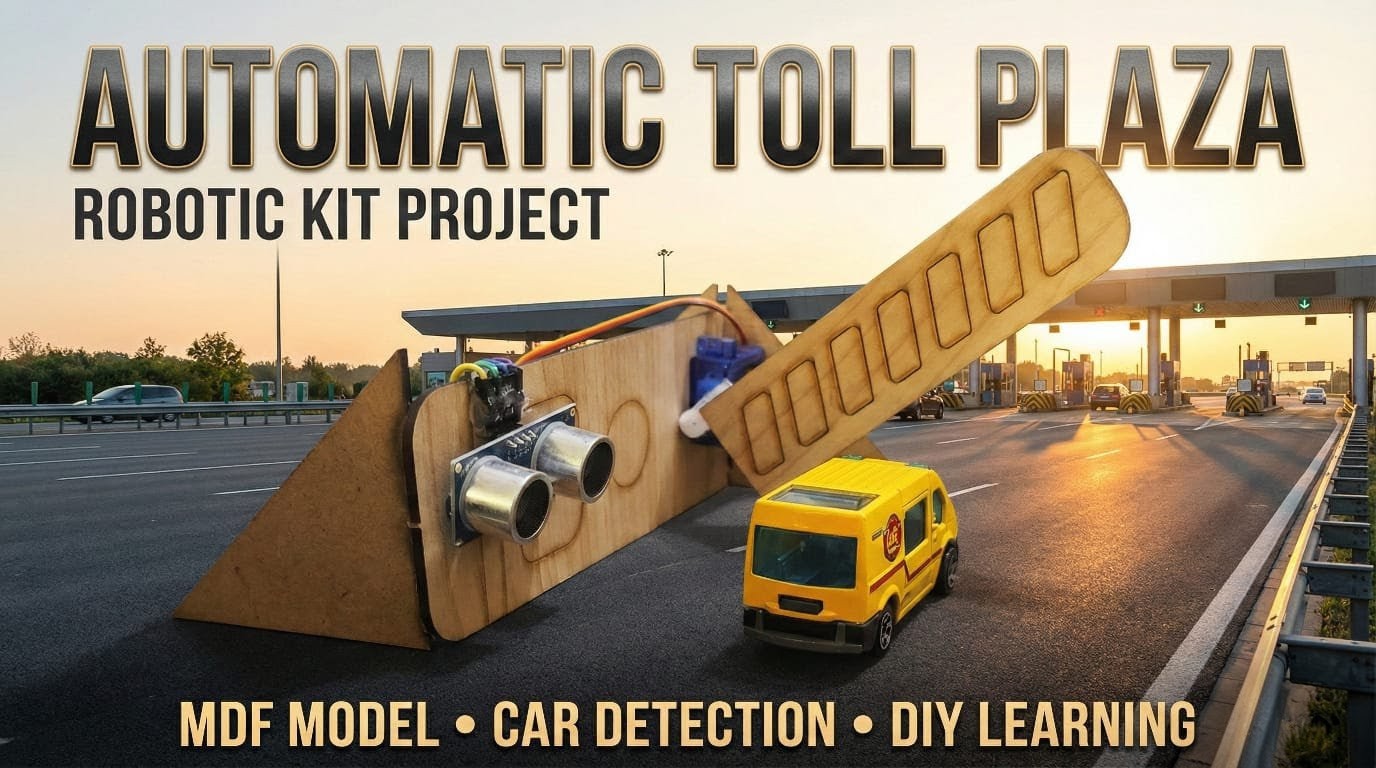
}What You Need for This Project
To build this Automatic Goalkeeper, we used the following parts from the Plzpapa Basic Robotic Kit:
- Arduino Uno Board
- Servo Motor (SG90)
- Ultrasonic Sersor
- Wooden Goalkeeper Structure
- Jumper Wires
- (No soldering required!)